Planetary Exploration
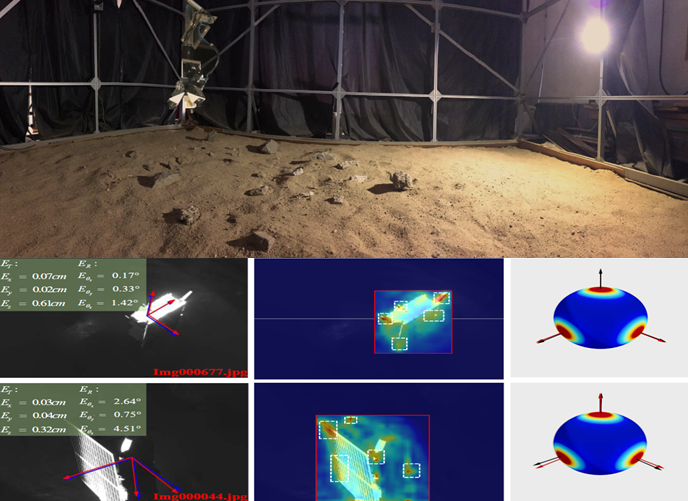
Object Detection for Planetary Rover & Orbiter
We focus on perception, planning, learning and control for planetary surface exploration. Our work spans algorithm design and experiments for rovers on Mars and other planets, supporting real-world space missions. We are also developing detection methods for space debris to enhance spacecraft safety.
Bionic Optics
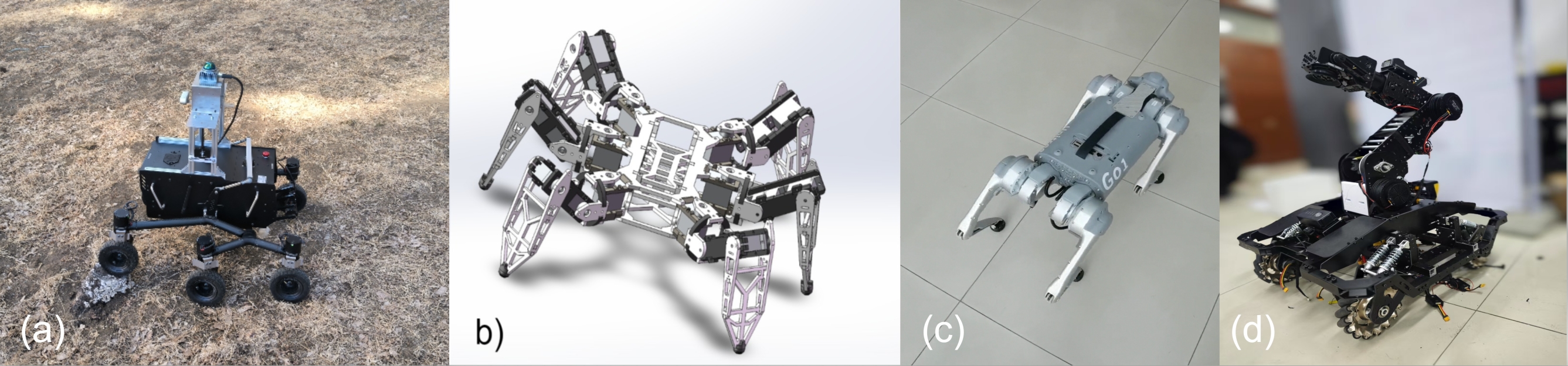
Bionic Optics & Bio-inspired Robots
How do insects use compound eyes for perception? We explore neural network models and high-speed obstacle avoidance inspired by biological systems, aiming to build smarter robots. Our research combines visual neuroscience and robotics to push the boundaries of bionic design.

Interdisciplinary
Interdisciplinary Vision & Collaboration
We collaborate across computer vision, robotics, optics, and machine learning, encouraging interdisciplinary research for intelligent space exploration and real-world robotics challenges.

Student Projects
Robotics Competitions & Student Projects
We participate in Robomaster and run Open Projects for students, including object detection & segmentation, object tracking, and non-contact medical measurement using UAVs/UGVs. Our group fosters creativity and engineering skills through hands-on robotics experience.